Mediapipe arm posture control robotic arm
1.Introduction
MediaPipe is a data stream processing machine learning application development framework developed and open-source by Google. It is a graph based data processing pipeline used to build and utilize various forms of data sources, such as video, audio, sensor data, and any time series data.
MediaPipe is cross platform and can run on embedded platforms (such as Raspberry Pi), mobile devices (iOS and Android), workstations, and servers, with support for mobile GPU acceleration. MediaPipe provides cross platform, customizable ML solutions for real-time and streaming media.
The core framework of MediaPipe is implemented in C++and provides support for languages such as Java and Objective C. The main concepts of MediaPipe include packets, streams, calculators, graphs, and subgraphs.
Features of MediaPipe:
- End to end acceleration: Built in fast ML inference and processing can accelerate even on regular hardware.
- Build once, deploy anytime, anywhere: A unified solution suitable for Android, iOS, desktop/cloud, web, and IoT.
- Ready to use solution: a cutting-edge ML solution that showcases all the functionalities of the framework.
- Free and open-source: frameworks and solutions under Apache 2.0, fully extensible and customizable.
2. Working principle
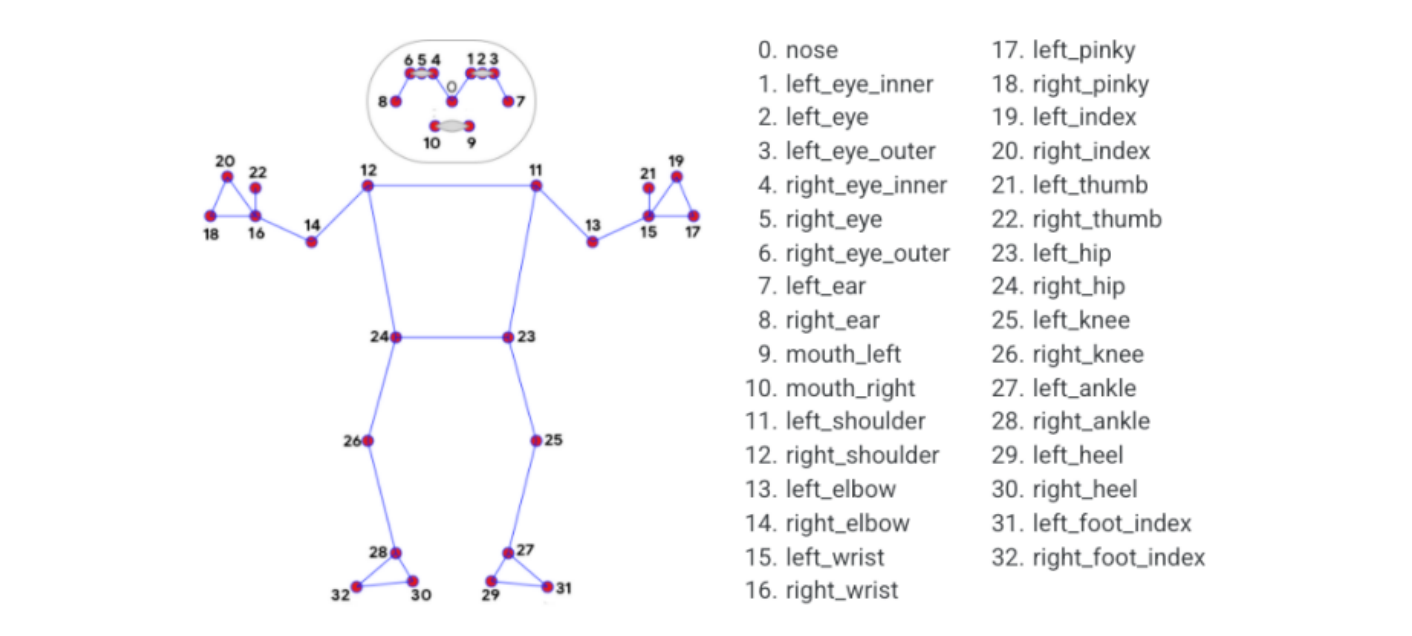
The landmark model in MediaPipe Pose predicted the positions of 33 pose coordinates (as shown in the figure below).
3. Start
3.1 Preparation
Note: when the program is running, the robotic arm has a large range of movement. Do not place other objects around the robotic arm to avoid being hit by the robotic arm.
3.2 Code analysis
After the program is started, stand in front of the camera so that the upper part of the body appears in the picture. There are a total of five body movements that can control the movement of the robotic arm.
The five movements are [lower left hand, raise right hand] [lower right hand, raise left hand] [both hands up] [hands on waist] [hands forming a triangle].
3.3 Start program
- Input following command to start the program
roscore
rosrun jetcobot_mediapipe PoseArm.py
3.4 About code
Code path:~/jetcobot_ws/src/jetcobot_mediapipe/scripts/PoseArm.py
#!/usr/bin/env python3
# encoding: utf-8
import os
import threading
import cv2 as cv
import numpy as np
from media_library import *
from time import sleep, time
from pymycobot.mycobot import MyCobot
from pymycobot.genre import Angle
class PoseCtrlArm:
def __init__(self):
self.mc = MyCobot(str(os.getenv('MY_SERIAL')), 1000000)
self.car_status = True
self.stop_status = 0
self.locking = False
self.pose_detector = Holistic()
self.hand_detector = HandDetector()
self.pTime = self.index = 0
self.media_ros = Media_ROS()
self.reset_pose()
self.event = threading.Event()
self.event.set()
def reset_pose(self):
self.mc.send_angles([0, 0, 0, 0, 0, -45], 50)
sleep(1.5)
def process(self, frame):
frame = cv.flip(frame, 1)
frame, pointArray, lhandptArray, rhandptArray = self.pose_detector.findHolistic(frame)
threading.Thread(target=self.arm_ctrl_threading, args=(pointArray, lhandptArray, rhandptArray)).start()
self.cTime = time()
fps = 1 / (self.cTime - self.pTime)
self.pTime = self.cTime
text = "FPS : " + str(int(fps))
cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)
self.media_ros.pub_imgMsg(frame)
return frame
def get_angle(self, v1, v2):
angle = np.dot(v1, v2) / (np.sqrt(np.sum(v1 * v1)) * np.sqrt(np.sum(v2 * v2)))
angle = np.arccos(angle) / 3.14 * 180
cross = v2[0] * v1[1] - v2[1] * v1[0]
if cross < 0:
angle = - angle
return angle
def get_pos(self, keypoints):
str_pose = ""
# Compute the angle between the left arm and the horizontal direction.
keypoints = np.array(keypoints)
v1 = keypoints[12] - keypoints[11]
v2 = keypoints[13] - keypoints[11]
angle_left_arm = self.get_angle(v1, v2)
# Compute the angle between the right arm and the horizontal direction.
v1 = keypoints[11] - keypoints[12]
v2 = keypoints[14] - keypoints[12]
angle_right_arm = self.get_angle(v1, v2)
# Compute the left elbow angle.
v1 = keypoints[11] - keypoints[13]
v2 = keypoints[15] - keypoints[13]
angle_left_elow = self.get_angle(v1, v2)
# Compute the right elbow angle.
v1 = keypoints[12] - keypoints[14]
v2 = keypoints[16] - keypoints[14]
angle_right_elow = self.get_angle(v1, v2)
if 90<angle_left_arm<120 and -120<angle_right_arm<-90:
str_pose = "NORMAL"
elif 90<angle_left_arm<120 and 90<angle_right_arm<120:
# # translated to English (best-effort)
str_pose = "RIGHT_UP"
elif -120<angle_left_arm<-90 and -120<angle_right_arm<-90:
# # translated to English (best-effort)
str_pose = "LEFT_UP"
elif -120<angle_left_arm<-90 and 90<angle_right_arm<120:
# # translated to English (best-effort)
str_pose = "ALL_HANDS_UP"
elif 130<angle_left_arm<150 and -150<angle_right_arm<-130 and 90<angle_left_elow<120 and -120<angle_right_elow<90:
# # translated to English (best-effort)
str_pose = "AKIMBO"
elif -150<angle_left_arm<-120 and 120<angle_right_arm<150 and -85<angle_left_elow<-55 and 55<angle_right_elow<85:
# # translated to English (best-effort)
str_pose = "TRIANGLE"
# print("str_pose = ",str_pose)
# print("angle_left_arm = ",angle_left_arm,"\tangle_right_arm = ",angle_right_arm)
# print("angle_left_elow = ",angle_left_elow,"\tangle_right_elow = ",angle_right_elow)
return str_pose
def arm_ctrl_threading(self, pointArray, lhandptArray, rhandptArray):
keypoints = ['' for i in range(33)]
if self.event.is_set():
self.event.clear()
if len(pointArray) != 0:
for i in range(len(pointArray)):
keypoints[i] = (pointArray[i][1],pointArray[i][2])
str_pose = self.get_pos(keypoints)
if str_pose:
print("str_pose = ",str_pose)
if str_pose=="RIGHT_UP":
self.RIGHT_UP()
elif str_pose=="LEFT_UP":
self.LEFT_UP()
elif str_pose=="ALL_HANDS_UP":
self.ALL_HANDS_UP()
elif str_pose=="TRIANGLE":
self.TRIANGLE()
elif str_pose=="AKIMBO":
self.AKIMBO()
self.event.set()
else:
self.event.set()
def RIGHT_UP(self):
self.mc.send_angles([90, 80, 0, -90, -90, -45], 50)
sleep(3)
self.reset_pose()
def LEFT_UP(self):
self.mc.send_angles([-90, 80, 0, -90, 90, -45], 50)
sleep(3)
self.reset_pose()
def ALL_HANDS_UP(self):
self.mc.send_angles([0, 0, 0, 80, 0, -45], 50)
sleep(3)
self.reset_pose()
def TRIANGLE(self):
self.mc.send_angles([0, 90, -120, 50, 0, -45], 50)
sleep(3)
self.reset_pose()
def AKIMBO(self):
self.mc.send_angles([0, 90, -120, -20, 0, -45], 50)
sleep(3)
self.reset_pose()
if __name__ == '__main__':
rospy.init_node('PoseCtrlArm_node', anonymous=True)
pose_ctrl_arm = PoseCtrlArm()
capture = cv.VideoCapture("/dev/video0")
capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G'))
capture.set(cv.CAP_PROP_FRAME_WIDTH, 640)
capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480)
print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS))
while capture.isOpened():
ret, frame = capture.read()
frame = pose_ctrl_arm.process(frame)
if cv.waitKey(1) & 0xFF == ord('q'): break
cv.imshow('frame', frame)
capture.release()
cv.destroyAllWindows()