04-Publisher
4.1 Publisher
Publishers are responsible for publishing messages. These messages can be sensor data transmitted from a lower-level controller to a higher-level system, or processed data sent from the upper computer to subscribers that have subscribed to the topic.
4.2 Create a Workspace and Topic Feature Package
4.2.1 Creating a Workspace
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
4.2.2 Compilation Workspace
cd ~/catkin_ws/
catkin_make
4.2.3 Updating Environmental Variables
source devel/setup.bash
4.2.4 Checking Environmental Variables
echo $ROS_PACKAGE_PATH
4.2.5 Create Function Package
cd ~/catkin_ws/src
catkin_create_pkg learning_topic std_msgs rospy roscpp geometry_msgs turtlesim
4.2.6 Compilation Function Package
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
4.3 Creating a Publisher
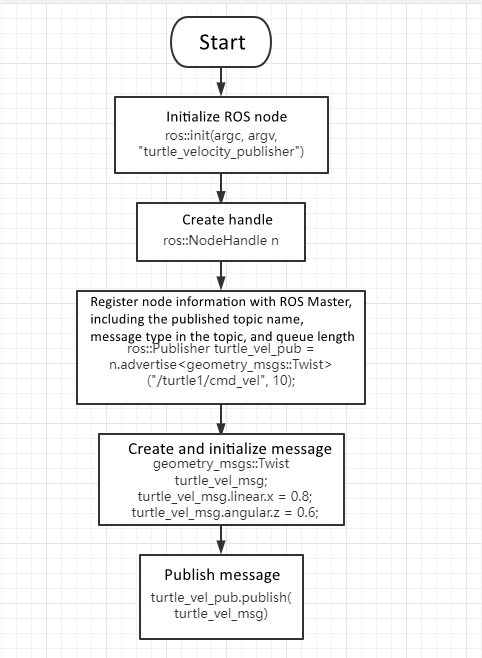
4.3.1 Creation Steps
- Initialize the ROS node
- Create a node handle
- Register node information with ROS Master
- Create and initialize message data
- Send messages in a loop at a fixed frequency
4.3.2 C++ Language Implementation
Create the file below inside the src directory of your package:
turtle_velocity_publisher.cpp
Paste the following code into the file:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "turtle_velocity_publisher");
ros::NodeHandle n;
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ros::Rate loop_rate(10);
while (ros::ok())
{
geometry_msgs::Twist turtle_vel_msg;
turtle_vel_msg.linear.x = 0.8;
turtle_vel_msg.angular.z = 0.6;
turtle_vel_pub.publish(turtle_vel_msg);
ROS_INFO("Publish turtle velocity command [%0.2f m/s, %0.2f rad/s]",
turtle_vel_msg.linear.x, turtle_vel_msg.angular.z);
loop_rate.sleep();e
}
return 0;
}
Program Flow Diagram
CMakeLists.txt Configuration
Add the following to your CMakeLists.txt:
add_executable(turtle_velocity_publisher src/turtle_velocity_publisher.cpp)
target_link_libraries(turtle_velocity_publisher ${catkin_LIBRARIES})
Compile the Workspace
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Run the Program
Start ROS master:
roscore
Run the turtle simulator:
rosrun turtlesim turtlesim_node
Run the publisher node:
rosrun learning_topic turtle_velocity_publisher
fileciteturn3file0