01-ROS Introduction
- ROS Wiki: http://wiki.ros.org/\
- ROS Tutorials: http://wiki.ros.org/ROS/Tutorials\
- ROS Installation (Ubuntu): http://wiki.ros.org/melodic/Installation/Ubuntu
ROS (Robot Operating System) is an open-source operating system designed for robots. It provides essential services including hardware abstraction, low-level device control, commonly used functionality, inter-process communication, and package management.
The primary goal of ROS is to support code reuse in robot research and development. ROS follows a distributed architecture based on nodes, which are organized into packages and can be shared and reused across projects.
1.1 Main Characteristics of ROS
- Distributed Architecture
- Multi-language Support
- Good Scalability
- Open Source (BSD License)
1.2 Overall Architecture of ROS
- Open-source Community Level\
- File System Level\
- Computation Graph Level
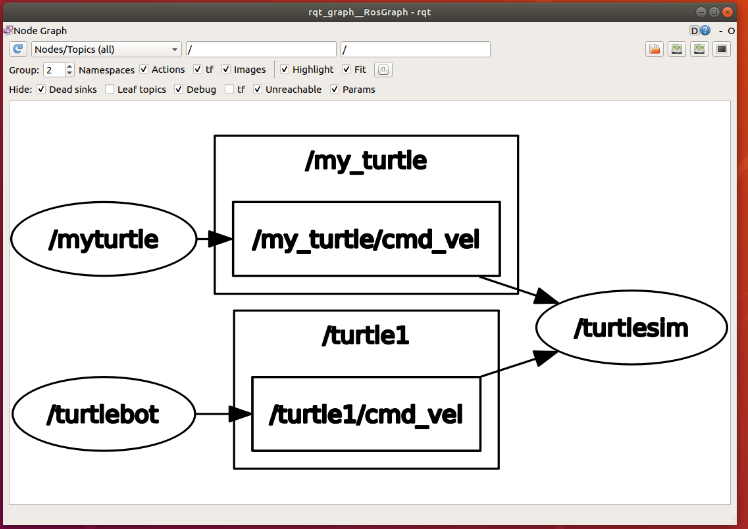
1.2.1 Computation Graph Level
Node
roscore
rosrun turtlesim turtlesim_node
rosservice call /spawn "x: 3.0
y: 3.0
theta: 90.0
name: 'my_turtle'"
rqt_graph
rosnode Commands
Command Description
rosnode list List nodes rosnode info Node info rosnode kill Kill node rosnode ping Check node rosnode machine List by machine rosnode cleanup Clear stale nodes
Message
rosmsg Commands
Command Description
rosmsg show Display fields rosmsg list List messages rosmsg package Messages in pkg rosmsg packages Packages using message rosmsg md5 MD5 checksum
1.2.2 File System Level
rospack Commands
Command Description
rospack help Help rospack list List packages rospack depends Dependencies rospack find Locate package rospack profile Refresh
1.2.3 Open Source Community Level
- ROS Distributions
- Software Libraries
- ROS Wiki
- Bug Tracking
- Mailing Lists
- ROS Answers
sidebar_position: 2 title: ROS Communication & Tools
1.3 Communication Mechanisms
Topic (Publish / Subscribe)
rostopic Commands
Command Description
rostopic bw Bandwidth rostopic echo View messages rostopic hz Frequency rostopic list List topics
Service (Client / Server)
rosservice Commands
Command Description
rosservice call Call service rosservice list List services rosservice info Service info
Action
Supports: - Goal tracking - Continuous feedback - Task cancellation
1.4 Common ROS Components
- Launch
- TF
- RViz
- Gazebo
- Navigation
- MoveIt
1.5 ROS Versions

Version OS
Noetic Ubuntu 20.04 Melodic Ubuntu 18.04